The long years of hibernation, out of contact with Rosetta, were spent completing the preparation for the comet phase of the mission, defining operations concepts, designing and testing software tools and procedures, hiring and training the newcomers in the flight control team. Never before in the history of space exploration had a space probe reached a comet and tried to orbit around it.
The flight dynamics and overall flight operations challenges were huge: we had to gradually approach the target comet, and then try and fly around it while building up our knowledge of the nucleus and its dynamical environment. Our Flight Dynamics colleagues had prepared a model of the comet, including its mass, shape and the dynamical forces that would act on our spacecraft, and integrated it into the orbit determination software. However, the model could only be built up and refined by using the Rosetta spacecraft itself as a ‘sensor’ of the dynamic perturbations. It was an iterative process that could only start when we were in proximity of the nucleus: it was like learning to fly by doing it!
In the meantime, Manfred Warhaut, the first ground segment manager of Rosetta back in 1996 when the project started, and since 2006 Head of the Mission Operations Department at ESOC, retired, and I took his place. As had already happened back in 2006, Andrea Accomazzo was selected to fill the post I had left vacant, and became Head of the Solar and Planetary Missions Division, as such also taking up the Rosetta Flight Director role.
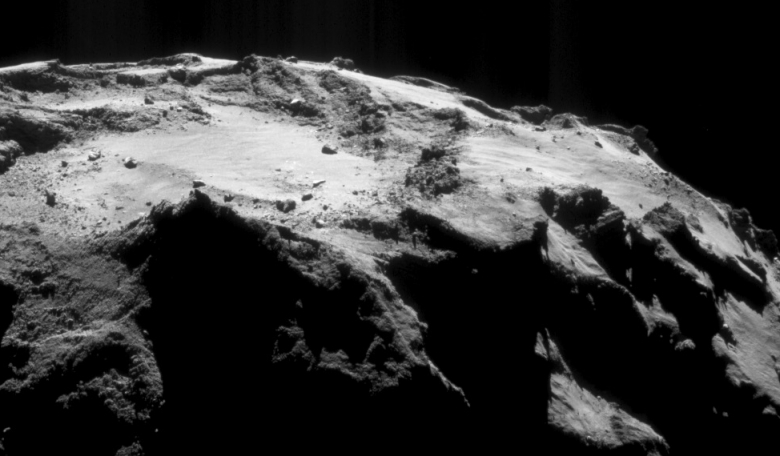
 Perihelion jet.
Perihelion jet.
It was hard for me to leave the active operations role on my beloved mission but I knew I left it in good hands, and after all I was still in charge of mission operations for the managerial aspects, as part of my new responsibilities. To fill in for Andrea’s former role as Rosetta Spacecraft Operations Manager we selected Sylvain Lodiot, who had come back to the team a few years earlier.
Never before in the history of space exploration had a space probe reached a comet and tried to orbit around it
On 20 January 2014 the moment of truth arrived: Rosetta was back at Sun distances short enough to allow us to safely reactivate all its systems and re-establish permanent radio contact with Earth. We set Rosetta’s wake-up timers for 10:00 UTC on-board time. The timers would automatically initiate a series of activities on the spacecraft, involving the warm up of various units, stopping the rotation, acquiring the stars and three-axis stabilisation, directing the high gain antenna towards Earth and activating the transmitter.
Only at the end of this sequence, that we estimated to last about six hours, would we receive the long-awaited signal from the spacecraft, indicating that it was still there, healthy and ready to perform its fantastic mission. At this time Rosetta was at about 800 million km from Earth, so the radio signal would take almost 45 minutes to reach us. Overall, taking into account the uncertainties in all the automatic activities and the possible drift of the on-board clocks over 2.5 years, we calculated that we would receive the first signal between 18:30 and 19:30 local time in Darmstadt, Germany.
Sylvain with his team, Andrea, Manfred, myself and a few others were eagerly waiting for the signal in the main control room. In another building, our communications people had organised an event with ESA management, VIPs and press. We were surprised by the large attention the wake up of Rosetta had attracted around the world, and this increased the level of tension in the operations team.
Waiting for a signal
Two NASA Deep Space Network 70 m antennas - Goldstone in California and Canberra in Australia - were pointed to the place in the sky where Rosetta was predicted to be, waiting for the signal. I was nervous all the time, while Andrea, Manfred and most of the others looked very relaxed at the beginning. But time went on and at 19:00 we still had no signal. I could see the tension growing, and found myself mentally counting the seconds to the end of the window.
My Director, Thomas Reiter, sitting in the Press event, was bombarding me with text messages, trying to get my feelings about the situation. I managed to keep cool, at least in my responses, not showing the unbearable tension that was growing inside me: I knew that at 19:30 I would have had to go on the event and explain to the audience why we had not received a signal… At 19:18, very close to the end of the predicted one-hour window, a small feature slowly appeared in the spectrum analysers of the ground stations. It was small, but it was present in both stations and it seemed to constantly grow. It took about one minute for us to realise: it was real, it was a signal from our spacecraft, it was Rosetta calling home!
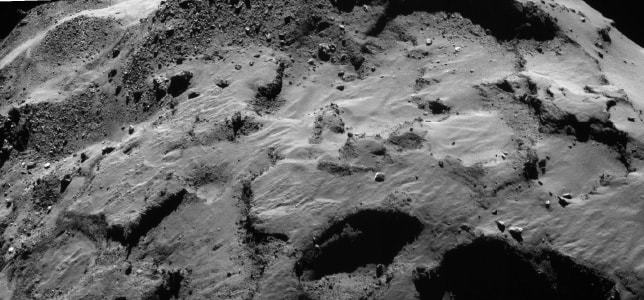
 Close flyby.
Close flyby.
In the night following the wake-up, the team configured the spacecraft to its normal flight mode and looked at the few telemetry indications we had from the long hibernation period. It turned out that due to a software problem a re-boot of the on-board computer had occurred back in 2012, and a second one at the start of the hibernation exit sequence. This explained the delay in the reception of the wake-up signal, the longest 18 minutes in my professional life.
 Rosetta views of comet on 20 July 2014 and (right) Philae lander contact signal in June 2015.
Rosetta views of comet on 20 July 2014 and (right) Philae lander contact signal in June 2015.
Now we had daily contact, and most of the seven billion km journey behind us. But the final approach to the comet was still long. First we had to gradually activate all instruments on-board, one at a time due to the very slowly increasing power output of the solar array while the distance to the Sun was decreasing. Then we had to perform the second part of the rendezvous manoeuvre, to finally match the comet orbit. It was only on the 20 March that a first picture of the target comet could be taken with the OSIRIS scientific camera. It was still just a dot, but psychologically it was a very important moment for the whole team: it was like seeing land in the distance after a 10 year-long ocean crossing trip.
 Waiting for Rosetta’s signal at hibernation exit on 20 January 2014.
Waiting for Rosetta’s signal at hibernation exit on 20 January 2014.
Only in July, at a distance of 12,000 km from the target, could the on-board cameras resolve the shape of the comet: and this was a huge surprise, as we found a very odd, rubber-duck shaped object instead of the expected usual potato shape. The scientists started speculating about the formation process of such object, while our operations team was concerned about the difficulties of modelling and orbiting it.
Preparations for landing
On 6 August we ‘stopped’ the spacecraft at a distance of 100 km. The characterisation phase had begun, with orbits that gradually decreased the distance and mapped the whole surface. While the scientists were enthusiastically analysing the initial pictures and measurements, our flight dynamics experts worked day and night to keep the spacecraft on the right trajectory and with the right pointing, while their models of the comet gradually improved in accuracy and stability.
They used new optical navigation techniques - identifying landmarks on the camera pictures of the comet and using them for triangulations to determine the position and velocity of the spacecraft relative to the surface - also developed for the first time for this phase of the mission. This was initially a manual process, that they managed to progressively automate in the first months around the comet.
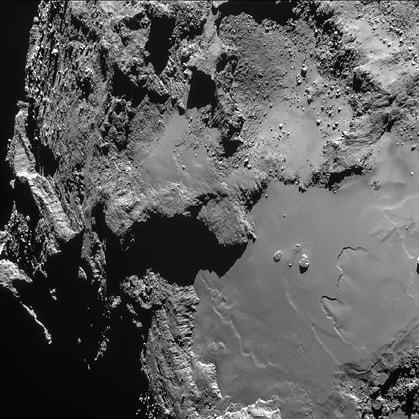
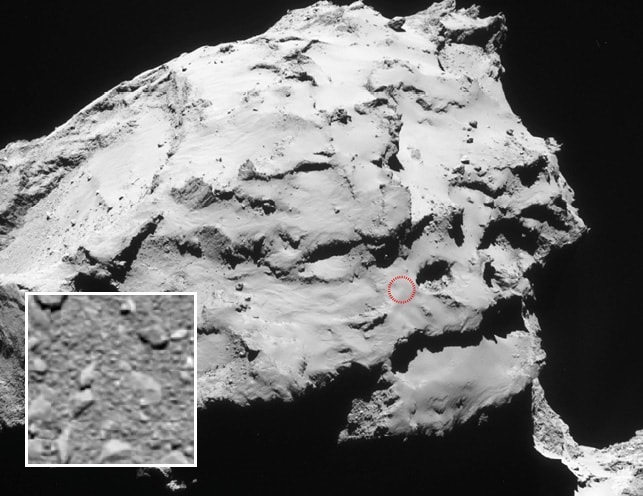
 Philae landing site image from a height of arpound 10 km.
Philae landing site image from a height of arpound 10 km.
The final characterisation phase was a close observation of several candidate landing sites for Philae. The selection of the landing site, involving the scientific community and the lander experts, was extremely complex but the process ran much more smoothly than expected, and rapidly converged on the winning candidate: Agilkia, on the ‘head” of the duck-shaped nucleus. A nice, relatively flat and sunny area, where the chances of landing success were the highest (though still not extremely high!).
Landing had to occur not earlier than 11 November, when the comet and Rosetta would approach the Sun down to a distance of three Astronomical Units (AU), or about 450 million km. But also not much later than that date, since the activity of the comet, approaching the Sun, would soon start to grow, preventing Rosetta from flying the trajectories needed for the delivery of the lander to the surface.
 Flight directors after Philae landing.
Flight directors after Philae landing.
Finally, we were all ready for 12 November, the selected landing day. The night before separation, which was planned for 10:30 in the morning Darmstadt time, the Philae lander was activated and prepared for the process, and we started to experience the first problems: the priming of the cold gas thruster that our colleagues from the Lander Control Centre in Cologne had planned to use to press Philae to the surface after touch down did not work. Also the conditioning of Philae’s batteries did not work as planned.
Selection of the landing site, involving the scientific community and the lander experts, was extremely complex but the process ran much more smoothly than expected
Nevertheless, our Cologne colleagues concluded that these problems were either not important or not solvable, and declared Philae ready for landing. In the meantime, Rosetta’s navigation was perfect, and the spacecraft performed a smooth manoeuvre to dive towards the comet before releasing the lander for its ballistic descent. We were ‘go’ for separation, which was commanded as planned. After that, Rosetta manoeuvred to a good visibility position and turned towards Philae, picking up its radio signal to relay it to Earth.
Philae fell for the planned seven hours, from an altitude of 22.5 km, and at 17:30 touched down, within 30 seconds from the predicted time, and less than 120 m away from the centre of the large landing error ellipse: a masterpiece of navigation by our flight dynamics experts and our great spacecraft and its propulsion system!
But Philae decided to keep us further under tension: the harpoons designed to anchor it to the surface after touch down did not fire, so that the lander started bouncing over the surface. We did not realise this immediately, as Philae was still in radio contact and had happily started to perform its scientific measurements, but after 20 minutes the confirmation came from Cologne: Philae was still flying!
Fortunately, the radio signal to Rosetta was never interrupted and after more than two hours Philae came to a rest in a dark corner, trapped by some extremely interesting comet surface ‘rocks’. The lander had been cleverly designed to run for about 60 hours on a primary battery, and execute its main sequence of all experiments. And it did so: we had five contacts with Rosetta of about two hours each in the next two days (one contact every 12 hours due to the comet rotation period), downloading all the scientific data collected by the Lander instruments.
Philae falls silent
After that, in the night of Friday, 14 November, the batteries ran out of energy and Philae went silent: in its final position on the surface there was not enough sunlight to recharge the secondary batteries, which we had hoped could give Philae the chance to operate for a few more weeks on the surface.
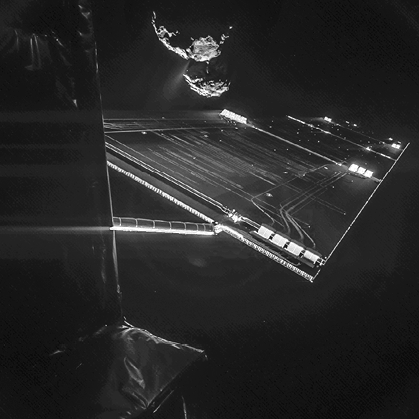 The famous Rosetta ‘selfie’ showing the mothercraft’s solar array with the comet above.
The famous Rosetta ‘selfie’ showing the mothercraft’s solar array with the comet above.
Now Rosetta could devote its operations to the orbital science, which was the primary objective of the mission: it had to follow the comet and observe its evolution around the perihelion, at least until the end of 2015. And this was very challenging, as the activity of the comet started to rapidly increase at the beginning of the new year.
At the end of January, we had to leave the closed orbits - which were too inaccurate due to the high activity of the comet - and started to perform close flybys. During one of these the star trackers were blinded by the high density of dust and resulted in a very dangerous situation for the spacecraft, which could no longer properly control its attitude. This was the signal that we had to gradually increase the distance to the comet until the high activity decreased after perihelion in summer.
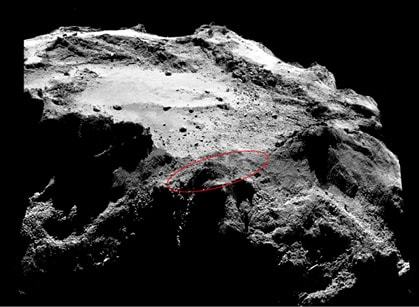
 Philae after first touchdown and (inset) the lander search area (red ellipse).
Philae after first touchdown and (inset) the lander search area (red ellipse).
While the spacecraft was at distances of about 200 km from the surface, suddenly one Saturday night - on 13 June - Rosetta received a feeble radio signal from Philae! Springtime had come also on the comet and the better illumination conditions and the higher surface temperatures allowed Philae to collect enough solar energy to boot-up its computer and try transmitting to Rosetta.
After the initial burst of joy our confidence to be able to ever operate with Philae again rapidly decreased: we were too far from the surface to be able to establish a stable radio link with the lander. We tried to decrease the distance but the comet activity was making it very difficult for us to fly in the thick cloud of dust. We managed to go down to 150 km from the surface and to establish nine short contacts with Philae until early July. After that, and a few days of silence, we had to increase the distance again. We never heard from Philae again.
After the perihelion in August and a planned ‘excursion’ to study the coma structure at distances up to 1500 km from the nucleus, we started to gradually decrease the spacecraft distance to the surface, and by the end of 2015 we were back to closed orbits.
This explained the 18-minute delay in the reception of the wake-up signal, the longest 18 minutes in my professional life
In the meantime, the huge success of the mission made it easy for the Science Programme Committee to approve an extension of the mission into 2016. At the same time, we knew that we could only operate Rosetta until the autumn of 2016: after that the distance to the Sun would have forced another long hibernation, even longer than the original one and at larger distances. The aging instruments and spacecraft, the depletion of the fuel reserve, and the risks involved in another hibernation were strong reasons to decide to stop the mission on 30 September 2016. However, we decided to finish it in a glorious way, with an attempted soft ‘touch down’ of Rosetta onto the surface of the comet.
More navigation challenges
The year 2016 was dedicated to close observations and scientific investigations of the comet and its changes after the perihelion passage. The amount of scientific data delivered by Rosetta was enormous, and the fact that we could observe the comet from close proximity over a large part of its orbital period was a fantastic opportunity for our scientists and a giant leap in comet and solar system science. The team also tried to use all occasions to take pictures of the area where we assumed Philae had ended its bouncing over the surface, but we did not succeed over many months.
 Philae’s first picture from the comet surface.
Philae’s first picture from the comet surface.
In the final weeks we could take increasing risks and fly Rosetta on three day elliptical orbits with a pericentre very close to the surface: we started from 7.5 km from the surface with the objective to try to go as close as 2 km by mid-September. This phase was even more challenging from the navigation point of view than the initial one after comet arrival.
Our flight dynamics people had to update software tools and procedures, and design very sophisticated strategies to be able to satisfy the needs of our scientists while keeping the risks on the spacecraft under control. It was during this phase that, on 2 September, during the last but one attempt to take a picture of Philae, from an altitude of 2.7 km, that we eventually succeeded!
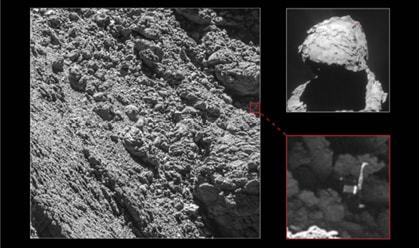 Philae is found on the surface.
Philae is found on the surface.
These pictures were not only emotionally very important for the operations teams but they were extremely useful for the analysis of Philae’s scientific measurements, that could be calibrated and put in the context of the orbital measurements from Rosetta now that the exact position of the lander was known.
Finally, after the last close pericentre on 24 September, we manoeuvred the spacecraft to a higher orbit and then in the evening of the 29th we performed a 35 cm/s manoeuvre that put Rosetta into collision course with the comet.
The selected area for touchdown was close to the Ma’at pits, large holes in the surface of very high scientific interest. During the last hours of descent Rosetta’s instruments could measure the comet environment and take pictures of the surface over the last range of altitudes, from 2 km to zero, which had never been ‘visited’ before by our spacecraft.
Emotional ending
Rosetta is the last of the pioneering space missions and its end marks the end of the pioneering phase of space exploration
Rosetta was programmed to transmit data in real time, and everything worked perfectly until touch down at 10:39 UTC on-board time. At that point, Rosetta switched itself off, as it was programmed to do by our last commands three hours before. A spectacular end to a fantastic mission. Sylvain and his Flight Control Team gave me the honour - about one hour and 20 minutes before the impact - to send the last command to Rosetta. It was a very emotional moment for all of us.
I am writing this final article just two days after the end of the Rosetta mission. This adventure has been a major part of my professional and private life for almost exactly 20 years, since I was nominated spacecraft operations manager back in November 1996. I have accompanied the mission throughout the initial phases of the spacecraft design up to the dramatic moments of the missed launch, the mission redefinition and then the long and often challenging cruise.
I have hired young engineers and scientists and seen them growing professionally with this mission, taking over the tasks from the older people, reinventing solutions and workarounds when problems were developing on board or on ground. I have lived the strong emotions of arriving at an unknown celestial object, exploring it for the first time over more than two years and even ‘living’ two and a half days with the Philae lander on its surface.
 Rosetta s final target destination circled in red and (inset) the spacecraft’s last image.
Rosetta s final target destination circled in red and (inset) the spacecraft’s last image.
Seeing the last telemetry frame freezing on the screens on 30 September was an unfortegttable moment for me. I have seen the end of other missions but this was something more than that. Rosetta was the last of the pioneering space missions and its conclusion marked the end of the pioneering phase of space exploration.
The new generations of spacecraft, of scientific instruments, of design and operations engineers will have to tackle the next challenge: the establishment of an operational exploration infrastructure in the Solar System, which will pave the way for a possible future human exploration of the planets, moons, asteroids and comets.